Controlled a Beambox Niji Badge over BLE from Windows without the official app. Sending a raw JPEG just produced a black screen — the fix was a custom binary container and a different command type than expected.
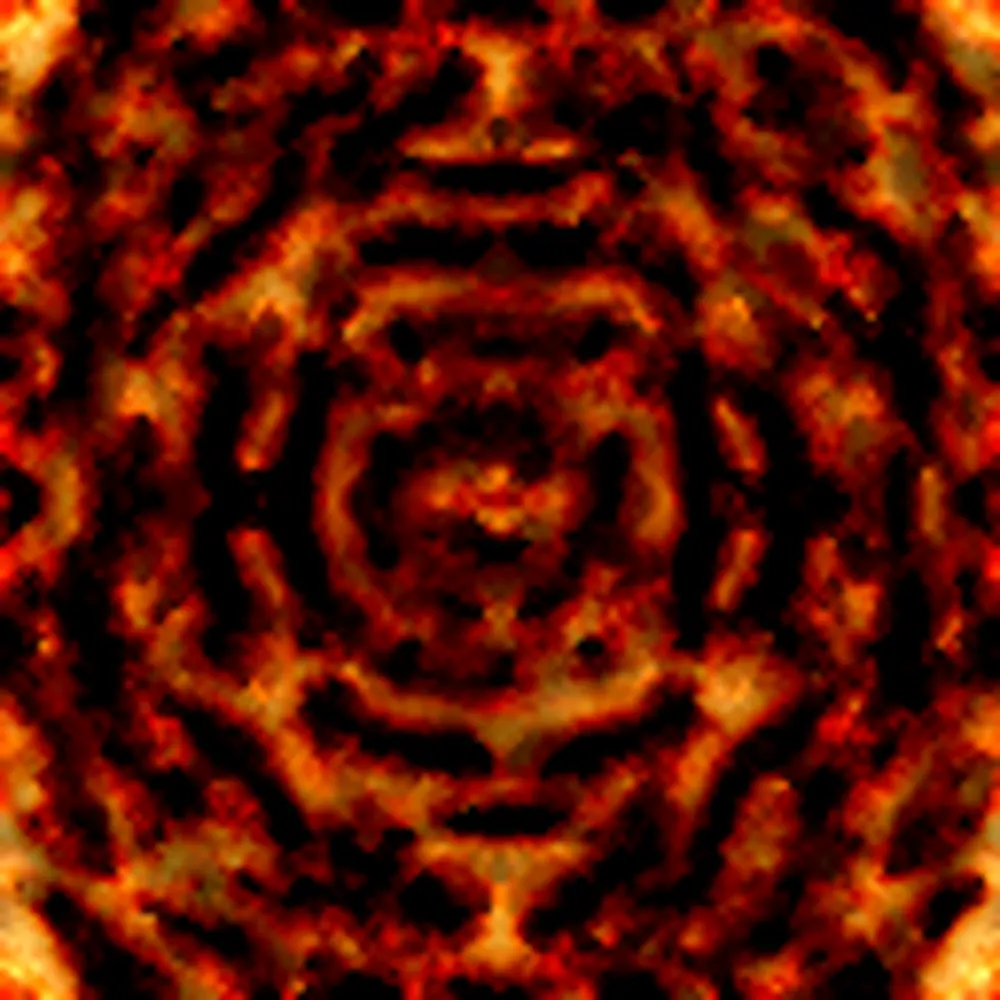
Tested on an M1 Max, NumPy only: Qwen maps a prompt to a JSON of knobs, and a 2D Kuramoto oscillator field renders it. No objects, but composition, color, and motion change with the prompt.
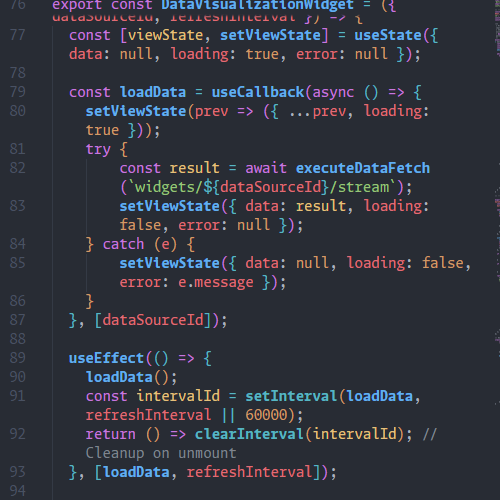
Tested Qwen3.7 Plus on ModelScope: native function calling and parallel tool calls work. I built a tool loop, skills, and error recovery with just the openai SDK, then had it ship a working Flask BBS.
google-cloud-aiplatform 1.139.0/1.140.0 had a predictable Model.upload staging bucket: pre-create that GCS bucket and you get model-swap RCE with no victim creds. Fixed in 1.148.0.
The ^^ cat ears operator is C++26's static reflection, turning types into std::meta::info. Plus the [: :] splice, an enum-to-string example, and current compiler support.
Tested Hermes Agent x_search on a basic X Premium plan (M4 Mac mini). Docs require Premium+ but the basic tier worked. Covers uvx + OAuth setup, the 8.4s vs 58.4s timing gap, and prompts that never invoke X search.
Why Google added BERT to search in 2019, how MLM training really works (15% mask, 80/10/10, WordPiece), and where encoder-only models still beat LLMs — rerank, classification, and OCR correction.
Tested on M1 Max: Floyd-Steinberg halftone + BLE pacing + a vendor-specific density command `1D 49 F0 nn` to print sharp photos on the Sugar YMP-01 thermal mini printer from Python.
Tested on M1 Max: switching a Python BLE client to RFCOMM (SPP Ch.2) cuts transfer from ~60s to 5.38s for a 140KB JPEG. Covers PyObjC quirks, macOS Bluetooth entitlement, and an isolation experiment confirming olie.xdev's 'possibly not required' steps.
Tested Orbis in Docker: psf/requests (35 modules) makes a clean 3D graph, expressjs/express (98 modules) collapses into one giant sphere. Notes on what tree-sitter actually captures for code-review prep.
uv 0.9.21 as the entry for small Claude SDK Python experiments: uv init, uv add, uv run, uv.lock keep agent projects reproducible across machines and Codex/Claude Code sessions. Operational notes, not a benchmark of the DEV article's uv 0.11.11.